In the mathematical section of this blog we deal with the geometry of Multivariate Normal Distributions [MVNs]. We found that the contour surfaces of MVNs are multidimensional ellipsoids given by quadratic forms of their constituting vectors. We have identified the variance-covariance matrix of a MVN as the inverse matrix mediating the required quadratic form. We also considered ellipsoidal cores of multivariate distributions and general properties of multidimensional ellipsoids and integrals over their volumes and surfaces. We have understood that both the analysis of multidimensional MVNs and their ellipsoidal cores and contour surfaces may involve orthogonal projections onto lower dimensional sub-spaces.
Now, a reader got interested in the figures resulting from such orthogonal projections. He asked me what the matrix for the quadratic form of the orthogonal projection image of a (n-1) dimensional-ellipsoid onto a (n-1)-dimensional sub-space of the ℝn looks like. The question was triggered by a statement in some of my posts that we can derive the elements of the matrix describing the lower dimensional projection image of a multidimensional ellipsoid from the matrix defining the original ellipsoid’s quadratic form. However, I have not yet explained, why this claim is true and what the relation between the matrices looks like. I will provide the requested information in this post-series.
Extension of the question and outlook
Actually, the question of the reader is a very interesting one. However, as we will soon see, it must be reformulated. Ellipsoids are closed, surface manifolds, but the orthogonal projection of an ellipsoidal surface gives you a volume in the lower-dimensional target space. So, actually, we have to discuss the relation of quadratic forms for the surface manifold in the original space on the one hand side and the surface of the ellipsoid’s projection image in the sub-space on the other side. The other critical question is, why we can assume that the projections of ellipsoids have an ellipsoidal surface, at all.
A convincing answer to the reader’s question must, therefore, include proofs of at least the following two points:
I) The orthogonal projection of a (n-1)-dimensional ellipsoid to a p-dimensional sub-space of the Euclidean n-dimensional ℝn has a (p-1)-dimensional ellipsoidal border-surface.
II) There is a clear and directly usable relation between the matrices mediating the quadratic form of the original ellipsoid and the quadratic form defining the surface of the ellipsoid’s projected image. The elements of matrix for the original ellipsoid define the elements of the matrix for the surface of its projection image in a precise algebraic way.
With the allowance of the interested reader, I add two further questions:
III) What is the relation of the inverse matrices of the quadratic form matrices for the original ellipsoid on the one side and the projected lower dimensional ellipsoid on the other side?
IV) As ellipsoids are the contour surfaces of Multivariate Normal Distributions [MVNs]: What is the relation between the covariance matrix of a n-dimensional MVN and the covariance matrix of the MVN’s lower dimensional counterpart resulting from an orthogonal projection?
These are the topics of this post-series. Unfortunately, in some literature on multidimensional ellipsoids, point (I) above is taken as granted. But the proof is not trivial. Neither is the derivation of the relation between the involved matrices simple. At least for people whose primary domain of knowledge is not math. To build up the required insights, we start with projections along a vector onto an orthogonal (n-1)-dimensional subspace first and turn afterwards to projections onto p-dimensional sub-spaces.
In this first post, I will discuss some geometrical arguments. After some math they will provide us with an insight that leads us to an elegant way of proving claim (I) for a projection onto a (n-1)-dimensional sub-space orthogonal to any given vector (topic of two further posts). In a fourth post we look at certain Schur complements of the matrix defining the quadratic form of the original ellipsoid. This will enable us to analyze the relations of the matrices defining the original ellipsoid and surfaces of its (orthogonal) projection images as requested in point (II) above. In a fifth post we consider the inverse matrices of those mediating the involved quadratic forms. The surprisingly simple results will allow us to answer questions (III) and (IV). In a sixth post we will look at a numerical example for the projection of an ellipsoid from a 4-dimensional to a 2-dimensional space.
Knowledge requirements:
The reader should be familiar with quadratic forms, ellipsoids, MVNs and some Linear Algebra.
Relevance of orthogonal projections of ellipsoids for different application fields
The named problem, of course, touches properties of MVNs and their projections to lower-dimensional sub-spaces. But, reversely, it is also relevant for the reconstruction of MVNs or ellipsoids from their projection images in low-dimensional spaces. This directly leads to the question of how we get the elements of matrices controlling the quadratic form of a high-dimensional ellipsoid from matrices controlling its projections.
In the numerical domains of statistics and Machine Learning, there is e.g. the question how we can reconstruct points inside the volume of a (n-1)-dimensional ellipsoid from their projected elliptical images in 2-dimensional coordinate planes and how the coordinates of points in one projection are related to the coordinates of the same points in another projection. The relation between projections of ellipsoids and the original ellipsoid is also a topic when analyzing MVN-like distributions or MVN-like cores with the help of the PCA-method.
The relation between projections of a multidimensional ellipsoids registered on multiple planes and the original ellipsoid itself is of general interest in physics and astrophysics, too. E.g. for particle experiments where data coming from an approximately ellipsoidal volume are registered in detection planes.
The role of “tangential points”
To get to the aspired proofs, we will first look at a special and decisive aspect of the projections. It is related to the question how we can describe, identify and create those special points on the original ellipsoidal surface which determine the border of the orthogonal projection image of the ellipsoid. As long as we work with projections along some vector intuition and the example of a 2-dim ellipsoid tells us that these points must be points on the ellipsoidal where the projection vector is tangential to the surface.
Readers of this blog know already that an ellipsoid can be created by a applying an invertible linear transformation A to vectors of a (n-1)-dimensional unit sphere. I.e., we want to identify points on the unit sphere which get transformed by the (nxn)-matrix A to image points on the ellipsoid whose tangential spaces control the projection. We need to identify a mathematical condition for these points on the unit sphere. At the end of this post, we will use the results in a numerical example to find the surfaces of the projection images of an ellipsoid in ℝ3 to the three 2-dimensional coordinate planes.
Suppositions and basic relations
We work in the (Euclidean) ℝn. “dim” is used as an abbreviation of “dimensional”. CCS is an abbreviation for “Cartesian Coordinate System”. Unit vectors along the coordinate axes of the CCS covering the ℝn are named ei.
In this first post we will regard projections along a vector ep onto a (n-1)-dimensional sub-space, only.
A centered ellipsoid is given by a set of points (vectors xe,n) fulfilling
A is an invertible matrix. The set of un-vectors define the (n-1)-dim unit-sphere 𝕊n-1. By “centered” we mean that the center of the enclosed volume and the mean of all vectors coincides with the origin of the CCS, The quadratic form of the ellipsoid is given by a symmetric, invertible, positive-definite matrix Σ-1
The reader recognizes these formulas from the discussion of MVNs and related confidence ellipsoids in this blog. Also the inverse matrix Σ is symmetric, invertible and positive-definite. In the case of MVNs matrix, Σ represents the variance-covariance matrix of the statistical distribution.
Projections of closed surfaces give us lower-dimensional volumes
We just look at this important point with the help of an example. A basic insight, which is easy to prove, is that the image of the orthogonal projection of a unit-sphere onto a (n-1) dimensional sub-space (e.g. spanned by n-1 coordinate axes) is a (n-1)-dimensional unit ball and not a (n-2)-dimensional unit sphere. Just think about a projection of the points of the 2-dim surface of a unit-ball in the ℝ3 down to a 2-dim coordinate plane. I omit the rather simple generalized proof.
This means that the (orthogonal) projection of a (n-1) dimensional ellipsoid will give us some (n-1) dimensional volume in a (n-1)-dim subspace. This in turn means:
To identify the form of the surface of the projection we will need to care about special points on the surface of our original ellipsoid. Those points would mark a tangential space in the following sense: A line parallel to the projection vector touches the ellipsoid’s surface tangentially at our spacial points. Equivalently, the axis along which we project to an orthogonal subspace is orthogonal to the surface’s normal vector there.
Intuitively, we expect that the distance of our tangential points from the origin, measured only by components in the orthogonal sub-space, would be maximal. It is given by the points’ coordinates for all ei ≠ ep.
To understand these statements a bit better, we start with discussing an ellipsoid in the ℝ3 and its tangent planes parallel to a selected coordinate axis. This will help us to identify the properties of those points on the ellipsoid whose projection images are border points on the ellipsoid’s projection image. The eventual proof of claim (I) will be based on a central insight which the geometric approach leads us to.
Points on the ellipsoid which determine the border/surface of the projection
We use some wisdom of multidimensional calculus:
- A: The gradient of a multidimensional function F(x1, x2, …,xp, ..xn) is perpendicular to its (n-1)-dimensional contour manifolds/surfaces at all points of such surfaces. I.e., at any selected point the surface the gradient ∇F of F() for the point’s given coordinates provides a normal vector to the contour surface there. The (n-1)-dim sub-space orthogonal to the normal vector at a surface point is tangential to the surface. These are elementary results of calculus in Euclidean spaces, and I omit the proof.
Below we consider a projection along the direction of a selected coordinate axis and a respective unit vector ep onto the sub-space orthogonal to ep. (In a forthcoming posts we will generalize to other vectors.)
What can we say about those points which control the border of the ellipsoid’s projection image?
Guideline from 3-dimensional geometry
Let our intuition for the 3-dim case help us. Let us use a CCS of the ℝ3 with x-, y– and z-axes. The z-axis looks upwards. The ellipsoids main axes will in general rotated against the coordinate axes. The projection of the ellipsoid shall happen along the y-axis onto the (x,z)-plane. I.e. ep= ey. We look at all points of the ellipsoid above the (x,y)-plane with z > 0. There is exactly one point in the (x,z)-plane for which z gets a maximum value. This point obviously is one of many other members of the border of the projection’s image. How do we get this particular point on the ellipsoid which determines the projection with this maximum condition for z?
Move the (x,z) plane along the y-axis. Clearly, our critical point on the ellipsoid is one for which the z-coordinate takes a maximum value – depending on the varying x– and y-values. This means, we look for an extremum of z as a function of (x,y)-values, i.e. for an extremum of the function z(x,y).
The tangential plane at this special point has a normal vector parallel to the z-axis. Therefore, vectors defining the tangential plane would in our case be orthogonal to the y-axis. I.e., the tangential plane at each of our special points is a plane parallel to the (x,z)-plane ⊥ ey.
Now, let us look at a different CCS, which has x– and z-axis rotated by an angle in the plane orthogonal to the y-axis. Then the same argument as above holds. Thus, we get all points of the border of the projection image by looking at those points on the ellipsoid whose tangent planes have a normal vector which is orthogonal to the projection direction given by ey.
As said, the gradient of a function F3(x,y,z) which would give us our ellipsoid in the ℝ3 as a contour surface would be perpendicular to this surface (i.e. to its tangential plane). This means: We first need to find a proper function F3(). Afterward, we must identify points on the ellipsoid with the gradient of ∇F3 ⊥ ey :
For later posts you should remember that the definition of our required “special tangential points” in general refers to the well defined “tangential spaces” at these points. These tangential spaces must fulfill a condition with respect to the projection’s target space. We know as a supposition that the normal vector at any point of the ellipsoid’s surface is orthogonal to all vectors of the tangential space at the selected point. The key condition is: The tangential spaces at each of our special points must themselves be orthogonal to the projection’s target space. I.e., we look out for points where the normal surface vector is an element of the projection’s target space. This is a pattern which we later on can generalize to a multidimensional case. Only certain points of the ellipsoidal surface will fulfill this criterion.
In our simple 3D-example case, the target space is given by the sub-space orthogonal to the given vector of the projection’s direction. I.e. the target space is the (x,z)-plane ⊥ ey. I.e., we look out for all points on the ellipsoid where the normal vector is a member of the projection’s target space and has no component in the ey-direction.
A most simple function F3 would be
with v = (x,y,z)T and Σ3-1 being the matrix of the ellipsoid’s quadratic form.
The n-dimensional case
The argumentation in the general case is basically the same. You just have to replace the projection “plane” by projection “sub-space” and the tangent plane by a tangential subspace. The direction of our projection is assumed to be given by the unit vector ep, a member of chosen the base for the ℝn.
We now consider the direction of another base vector ek ⊥ ep and its coordinate axis. The projection of points on the ellipsoid E into the sub-space with vectors orthogonal to ep have varying xk-values. We look at that part of the (n-1)-dim ellipsoid for which the xk-values are positive. We interpret a coordinate value xk as a function of all other coordinates xk = xk (x1, …,xk-1, k+1, ..xn). Again, the point on the ellipsoid determining a border point on the projection image P(E) with maximum xk-value is given by an extremal value of xk. Let us call the vector to such a “tangential” point (with respect to ep) on the ellipsoid xtp,k ∈ E. Then we have
The gradient of a function Fn (x1, …xn) which produces the ellipsoid as a contour surface should have a direction parallel to ek and thus orthogonal to ep. Why can we claim this in the multidimensional case?
Firstly, note that one can show that the second derivatives on the surface of an ellipsoid have the same sign in the surroundings of an extremum. You see this relatively easy in the main axes system. Also note that condition (3) regarding the quadratic form can be re-written as
with some constant coefficients αi and βi,j. Let us define a suitable function Fn which gives us concentric ellipsoids as contour surfaces:
We could have used a density function of a MVN for this purpose. But that would have made things unnecessary complex. Our special ellipsoid is given by
What is the gradient ∇Fn of Fn? We look at a specific partial derivative and take into account (5):
Note that from (7) one can not draw any direct conclusions regarding the gradient at such points. We need secondary information.
Regarding xk = xk(x1, …,xk-1, k+1, ..xn) we can combine (5) with the requirement that the partial derivatives of this function should be zero at our critical points. We again look at (5), but this time focusing on xk().
On a continuous ellipsoidal surface this function is two times differentiable. Note that the sums on the right side include the index “i“. Now, we apply a differentiation with respect to variable “xi“:
Now, we demand that the partial derivative on the left side gets zero. This leads us to:
(12) follows from the fact that the left side of (11) reflects a condition for all partial derivatives of F() with the exception of the variation in ek-direction. I.e., an extremum of xk on the surface is given at a point where the gradient is parallel to the coordinate axis ek (- and where the Hesse matrix naturally fulfills the conditions of a maximum) (see 10 for 2nd order derivatives). The orthogonality with respect to ep is a direct consequence.
Now our argument is valid for any direction of a unit-vector u⊥p orthogonal to ep : You just have to choose a different CCS with ep kept fixed and with all other coordinate axes rotated around ep , such that the rotated image of the original ek coincides with u⊥p . So for all of our critical points xpt on the surface determining the border of the orthogonal projection along ep, we know
Reconstruction of tangential points from points on the unit sphere
For practical purposes we would like to construct the critical tangential points on the ellipsoid from special points unt of the unit sphere 𝕊n-1 by applying the matrix A to these points (see eq. (1)). What can we say about these points on the unit sphere?
Due to the constant elements of the matrix Σ-1 (see eq. (2)), the gradient of Fn can also be written in the following form:
Therefore, condition (14) is equivalent to
On the other side:
Taking into account eq. (2), this means
What do eqs. (1) and (20) tell us? All points on the unit sphere 𝕊n-1, which fulfill eq. (19), must also reside in a subspace orthogonal to A-1 ep. In a 3-dim space we would get these points as a cut of a plane orthogonal to A-1 ep with the unit sphere.
Summary:
This, actually, is a prescription of how to create such points on the ellipsoid.
Example in three dimensions
The following plots show different perspectives of an ellipsoid with very different main axes in 3 dimensions. The quadratic form of the ellipsoid is given by a matrix Σ
You may take its inverse to get Σ-1 . A Cholesky decomposition will give you a valid matrix A to construct the ellipsoid from vectors of unit sphere 𝕊2.
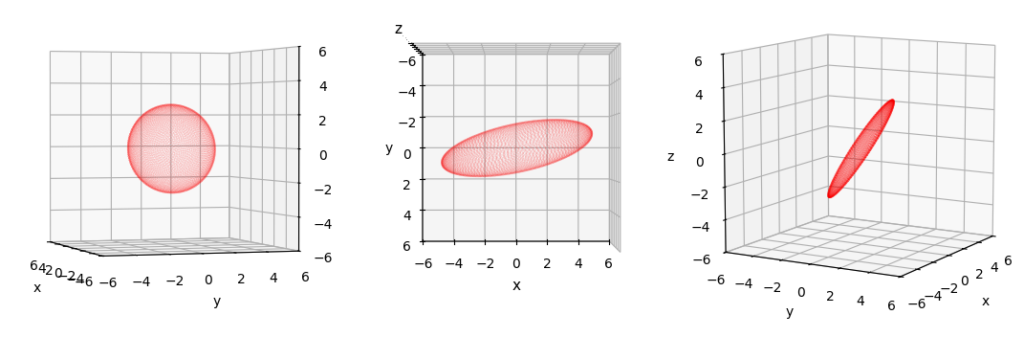
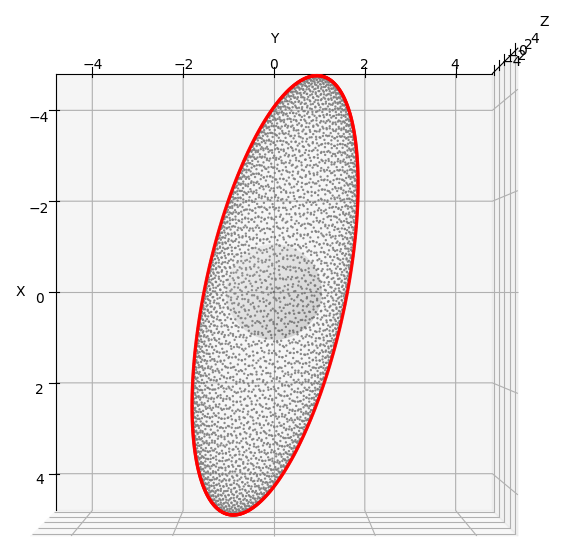
The following plot shows the points on the unit sphere which will give us the border points of the orthogonal projection onto the (y,z)-plane, i.e. ep = ex.
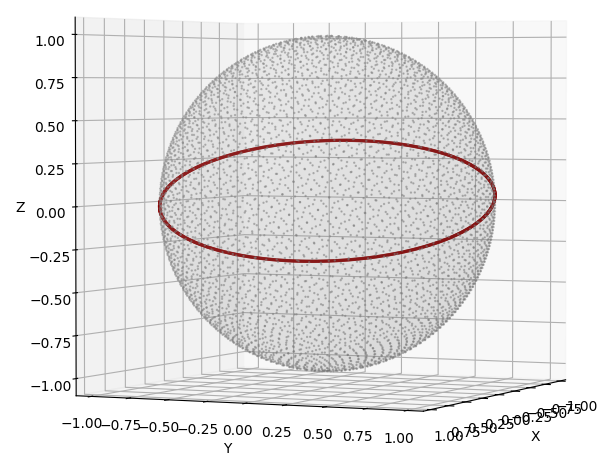
Hint: For those who want to perform the numerical experiment by themselves and are in doubt how to use (21) for defining a series of such points on the unit sphere 𝕊2: You may use the cross vector product v = [(A-1ep) x ez] of the vector A-1 ep and ez to get a vector in the required plane. Normalize it to length 1. Then apply the cross-vector product once again between A-1 ep and v to get a second base vector in the plane. Afterward parameterize a unit circle in the plane. Then apply matrix A to get and plot the points on the ellipsoid.
Now, if our considerations above are correct, we should exactly see the points after a transformation with A at the border of the ellipsoid when we look at the ellipsoid along the x-axis (azimuth=90; elevation=0). This is actually the case.
Points on ellipsoid giving the border-points of a projection onto the (x,z)-plane –
constructed via relation (21) and application of matrix A (ep = ex)
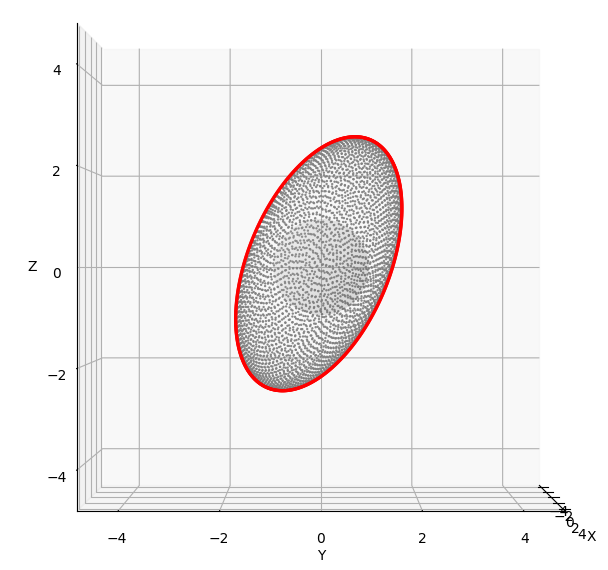
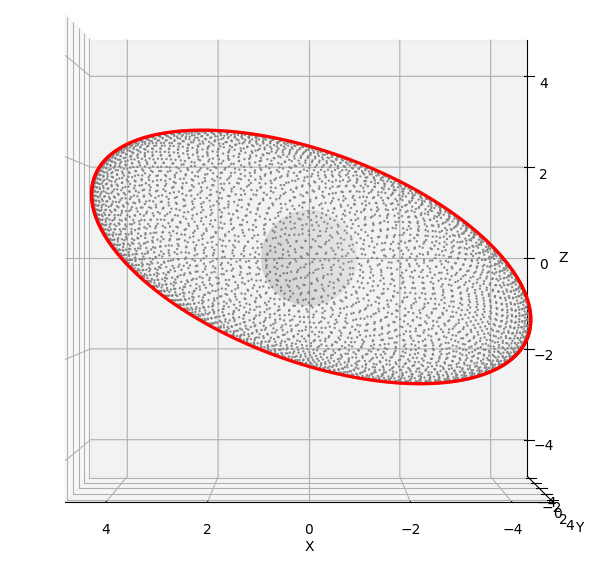
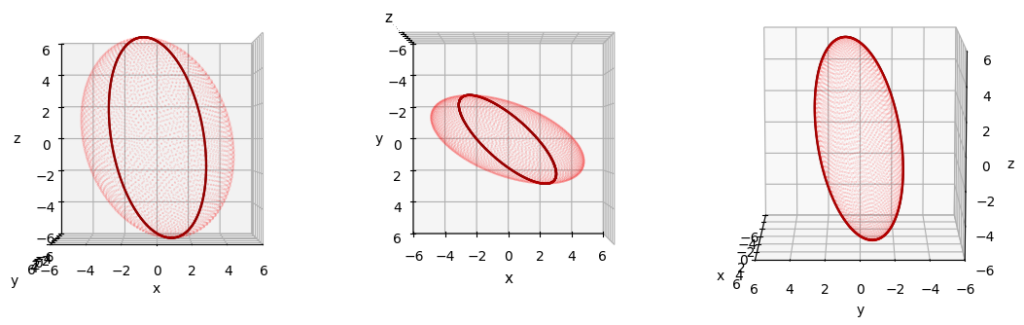
Below you see analogous results for the orthogonal projection onto the (x,z)-plane and the (x,y)-plane:
Points on ellipsoid giving the border-points of a projection onto the (y,z)-plane –
constructed via relation (21) and application of matrix A (ep = ey)
Points on ellipsoid giving the border-points of a projection onto the (y,z)-plane –
constructed via relation (21) and application of matrix A (ep = ez)
Readers who have repeated the experiment on their own may find the following: Due to the extreme form of the ellipsoid the calculated points are close to the border even when looked at the ellipsoid from different perspectives. Therefore, we need a different example.
Another example in three dimensions
Change the defining matrix to:
The following plots show the relevant points for different projections on the (y,z)-plane, the (x,z)-plane and the (x,y)-plane. Only from an appropriate perspective the calculated points mark the border of the points in the respective orthogonal projection.
Projection onto the (y,z)-plane
Projection onto the (x,z)-plane
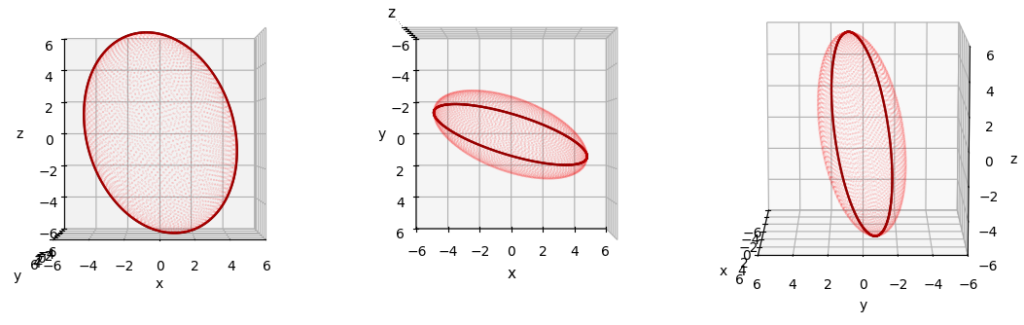
Projection onto the (x,y)-plane
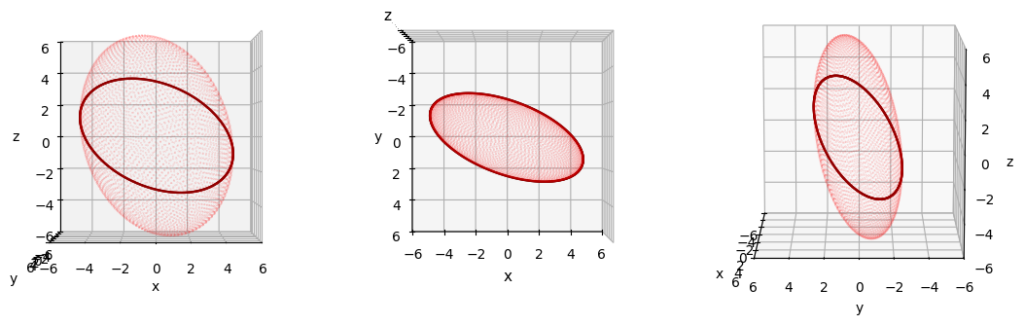
This gives us confidence in the whole mechanism.
What we still need to prove …
We know now which points on an ellipsoid’s surface give us the border points of the ellipsoid’s orthogonal projection image in a sub-space orthogonal to a coordinate axis (ep) of a CCS covering the ℝn. We still have to prove that the border-points of the projection follow a quadratic form and give us a (n-2)-dimensional ellipsoid. Afterwards, we can investigate the connection between the matrices governing the quadratic forms of the original ellipsoid and the border of its orthogonal “shadow” in the target sub-space. These will be the subjects of the forthcoming posts.
Conclusion
Orthogonal projections of multidimensional ellipsoids in the ℝn onto (n-1)-dimensional sub-spaces are of importance in statistics, physics and Machine Learning. An ellipsoid is given by the application of a matrix A upon vectors of the unit sphere 𝕊n-1 and a resulting quadratic form. In this post we have regarded projections onto sub-spaces which were orthogonal to a unit vector ep along the axis of a Cartesian coordinate system.
We have derived how we can calculate the vectors for those points on the ellipsoid for which the projection results in the outmost border points of the ellipsoid’s projection image. We have found that the required points on the ellipsoid can be constructed from points on a unit sphere, which are given by a cut with a sub-space orthogonal to a special vector A-1 ep. In the next post,
we will use this insight to prove that the border surface in the (n-1)-dimensional projection sub-space forms a (n-2)-dimensional ellipsoid. Stay tuned …